ANESTHESIA SIMULATOR
ContexteAu cours de ma dernière année d'étude d'ingénieur, j'ai effectué un stage au sein de l'équipe IRA2 du laboratoire de recherche IBISC (Informatique, BioInformatique, Systèmes Complexes) sur le développement et l'évaluation d’un simulateur immersif pour la formation d’opérateurs en anesthésie locorégionale écho-guidée. Il a été réalisé en collaboration avec des anesthésistes du Centre Hospitalier Sud Francilien (CHSF). Ce stage a également été financé par Genopole.
|
||
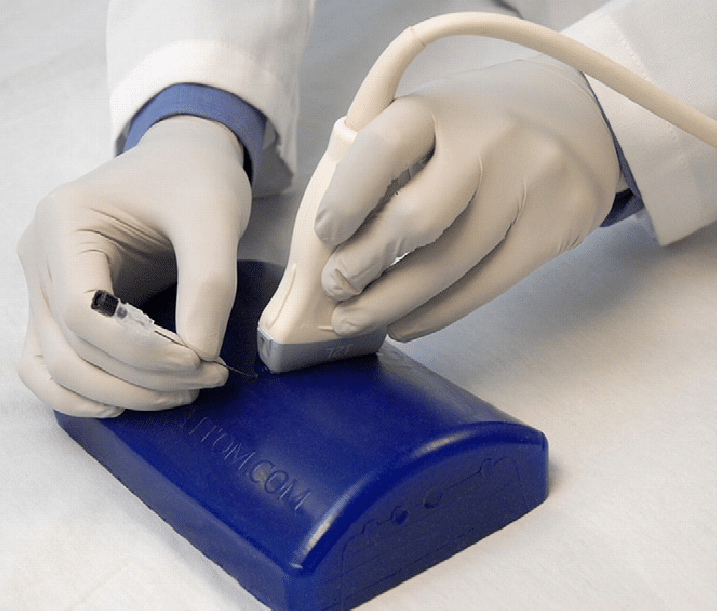
Pourquoi un simulateur virtuel ?La formation des personnels soignants est une question centrale du domaine médical car elle implique directement la sécurité des patients. Durant de nombreuses années, elle s’est fondée sur des enseignements théoriques puis de l’observation de praticiens confirmés avant d’être mis en situation réelle. Cependant, cette méthode d’enseignement n’est pas sans risques pour les patients. Pour cette raison, des simulateurs ont été élaborés afin de compléter cet enseignement et de le rendre moins dangereux pour les patients. L’apprentissage des compétences médicales et paramédicales à travers les outils de simulation devient une nécessité, comme le démontre la conclusion du rapport de la Haute Autorité de Santé en 2012 qui préconise que l’apprentissage ne se fasse « jamais la première fois sur un patient ». |
||
|
|
||
|
Cependant, les simulateurs réels ne sont conçus que pour une utilisation limitée (environ 10 insertions d'aiguille). Cette contrainte implique de renouveler le matériel régulièrement afin d'assurer l'entraînement pratique des apprentis. De ce fait, les entraînements pratiques sur simulateur restent assez faibles et cela n’est pas sans risques pour les patients. Pour améliorer cela, les formateurs souhaitent disposer d'un simulateur en réalité virtuelle pour compléter la formation actuelle.
|
||
Environnement virtuelNous avons utilisé le casque de réalité virtuelle HTC Vive ainsi que le moteur de jeu Unity 3D pour le developpement. Pour l'environnement virtuel, nous avons réalisé une scène 3D d'un bloc opératoire : |
||
|
|
||
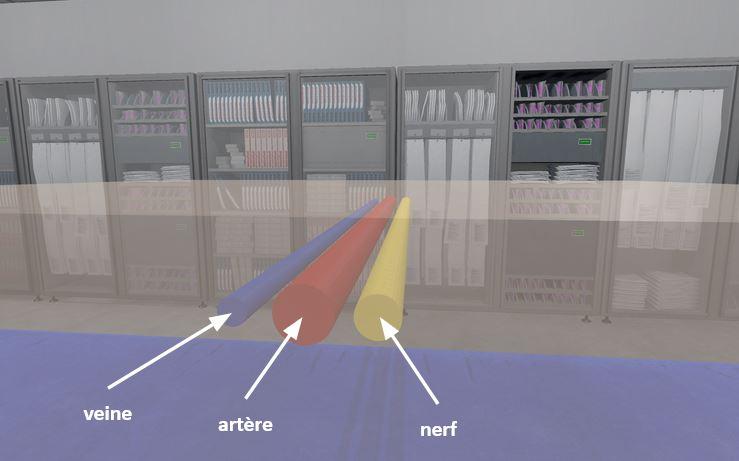
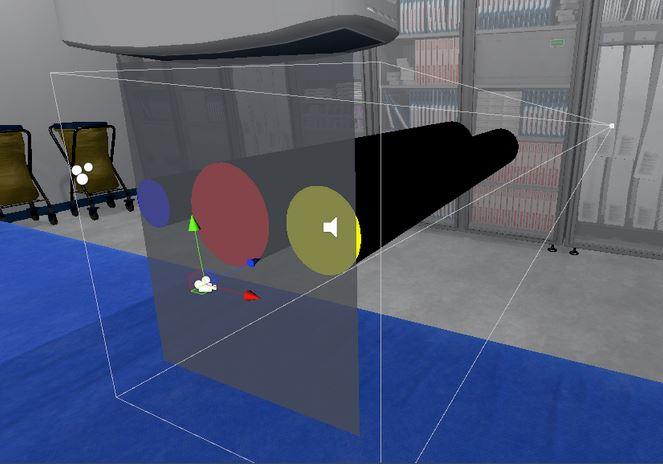
Reconstitution de l'intérieur d'une partie du corpsEn accord avec les anesthésistes, nous nous sommes concentrés sur le bloc fémoral (BNF). Il s'agit d'une anesthésie qui bloque la sensibilité du genou pour réduire la douleur après une chirurgie, en injectant un anesthésique autour du nerf fémoral. Pour cela, nous avons modélisé le corps du patient par un cube avec à l'intérieur la veine, l'artère et le nerf fémoral : |
||
|
|
||
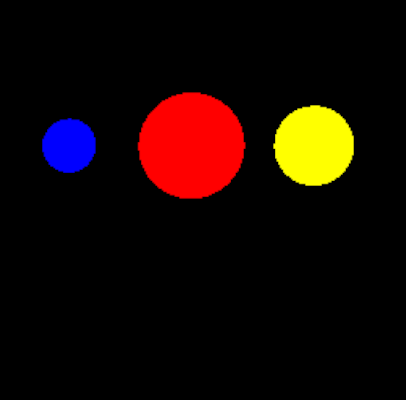
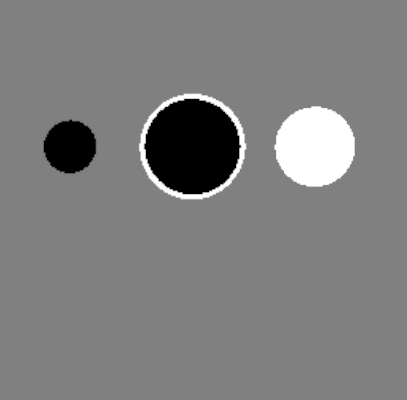
Comment concevoir une sonde à ultrasons ?PrincipeNous avons placé une caméra sous le modèle 3D de la sonde d'échographie afin de filmer l'intérieur de la peau. Nous avons également utilisé un shader pour obtenir une coupe 2D d'un objet en 3D. Ensuite, nous avons utilisé un autre shader dans le but de traiter l'image obtenue : |
||
 |
||
|
|
||
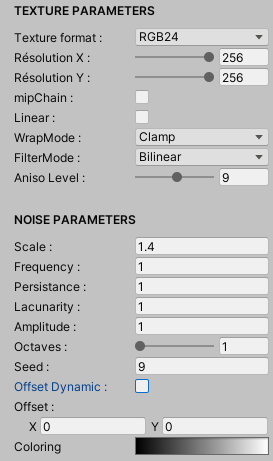
Rendu sur l'écran de l'échographePour améliorer le rendu visuel, nous avons ajouté un bruit de Perlin à notre image. Pour cela, nous avons réalisé un fichier de configuration pour paramétrer les différentes variables du bruit : |
||
|
|
||
|
Pour finir, nous avons multiplié le bruit à l'image d'échographie obtenue précédemment : |
||
|
|
||
Comment intégrer les sensations haptiques ?Intégration des deux bras haptiquesNous avons utilisé deux bras haptiques Geomagic Touch de la marque 3D System afin de manipuler la sonde d'échographie et l'aiguille : |
||

Pour l'intégration sur Unity 3D, nous n'avons pas utilisé le plugin fourni par le constructeur car il ne nous permettait pas d'appliquer deux comportements différents sur une même surface. En conséquence, nous nous sommes inspirés d'un plugin open source mis à disposition par un chercheur japonais : https://github.com/kirurobo/ManagedPhantom
|
||
Contraintes de mouvementLa sonde d'échographieLa sonde d'échographie doit bouger en translation à la surface de la peau du patient sans la traverser tout en ressentant des forces de frottement :
|
||
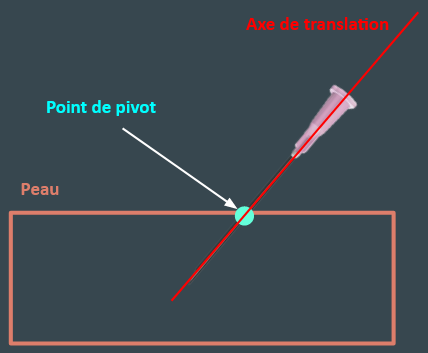
L'aiguilleContrairement à la sonde d'échographie, l'aiguille peut traverser la surface de la peau avec plusieurs contraintes de mouvement. Lorsque l'aiguille passe la surface de la peau, elle se retrouve bloquée sur son axe de translation et bloquée en rotation autour du point de contact avec la peau : |
||
|
|
||
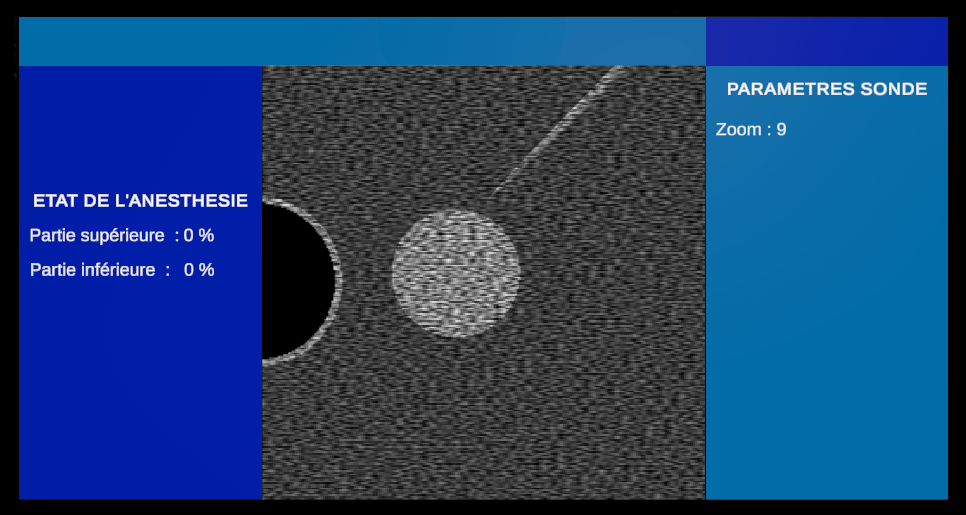
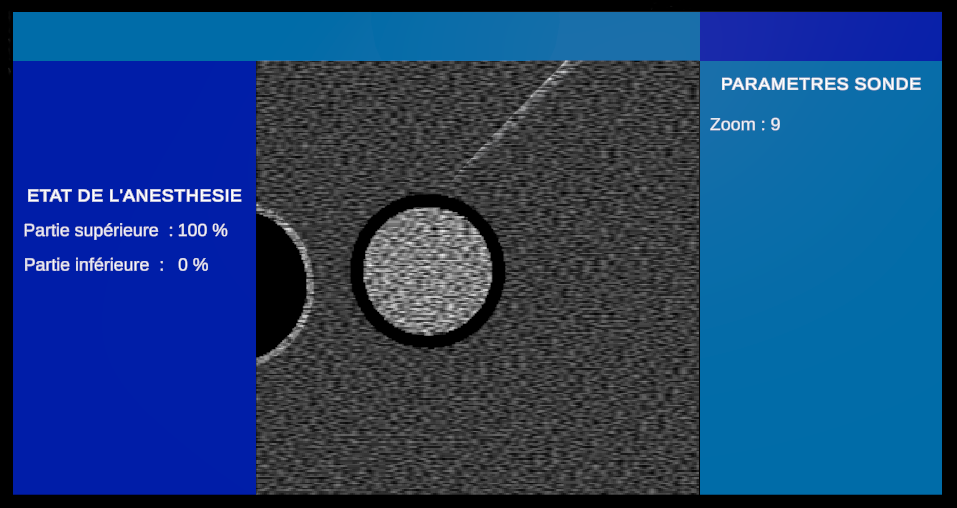
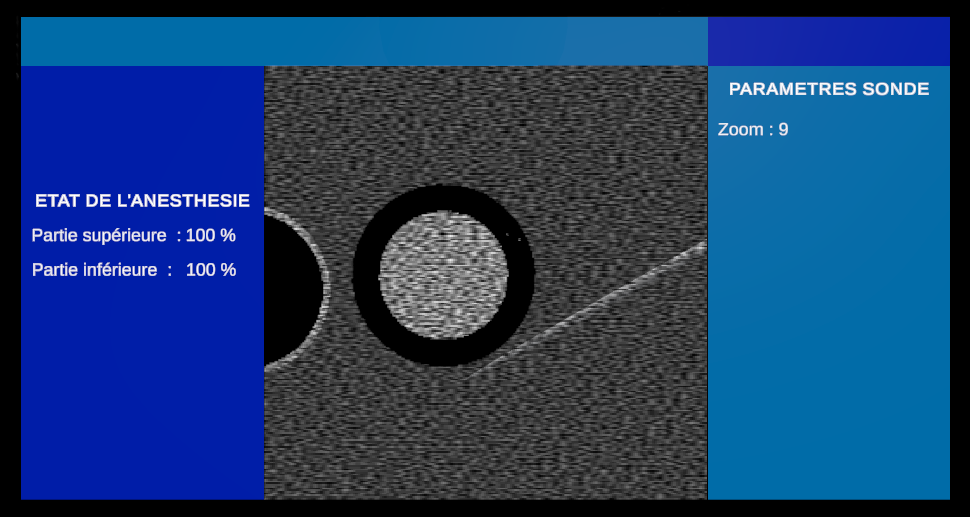
Injection de l'anesthésiqueL’injection de l’anesthésique doit être pratiquée au-dessus et en dessous du nerf. Nos observations au CHSF nous ont permis de comprendre l’influence de cette injection sur le rendu visuel de l’échographe. En effet, la présence de l’anesthésique autour du nerf va assombrir l’image autour de ce dernier. Afin de reproduire cet effet, nous avons adopté un cylindre de couleur noire qui augmentera au fur et à mesure de l’état d’avancement de l’injection. |
||
   |
||
|
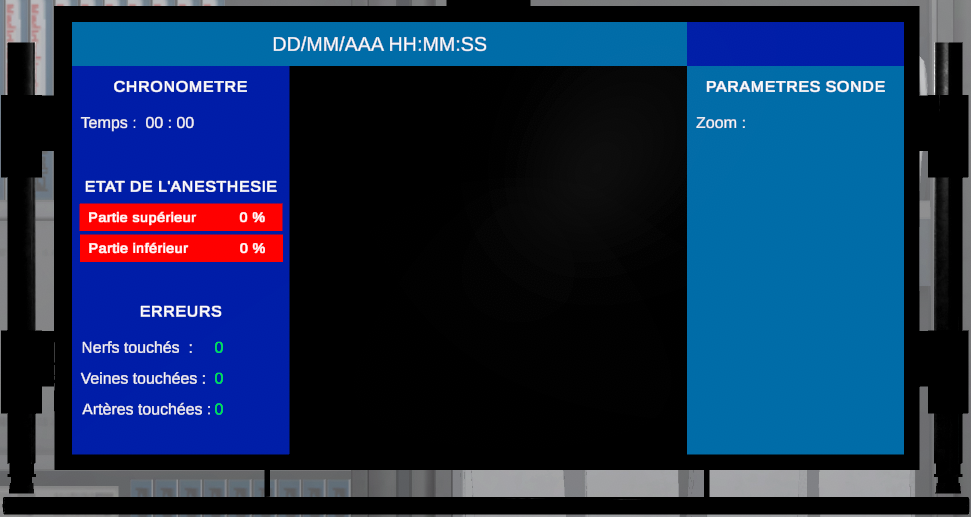
Finalisation du prototypePour apporter davantage de réalisme à notre simulateur, nous lui avons ajouté plusieurs éléments visuels et sonores. L’interface de l’échographe : |
||
 |
||
|
Les effets sonores :
D’autres sons auraient pu être ajoutés afin de perturber la progression de l’utilisateur comme une alarme incendie qui se déclenche ou bien le téléphone professionnel de l’anesthésiste sonnant en pleine opération. |
||
Évaluation du simulateurProtocole expérimentalNous avons créé un protocole permettant d’établir si le simulateur remplissait ou non les critères de validation, d’aspect et de contenu. Pour cela, nous nous sommes appuyés sur différents articles présentant des protocoles de validation de simulateur (médicaux ou non). Le protocole s’est déroulé de la manière suivante (≈ 15 minutes) :
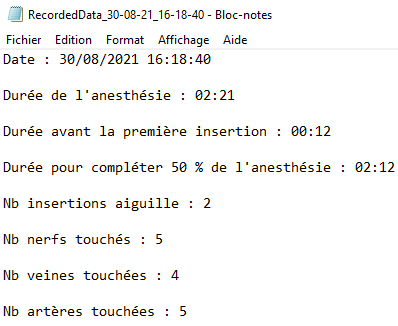
De plus, nous avons décidé de récolter les informations de la simulation (partie gauche de l’échographe) en générant un fichier texte lorsque l’anesthésie est complétée : |
||
 |
||
Mise en place du protocolePour mener à bien notre évaluation, nous avons installé notre simulateur au CHSF. Pour des raisons pratiques, nous avons utilisé le casque Oculus Rift plutôt que le HTC Vive, car ce dernier nécessitait d’avoir un espace plus important pour y installer les caméras de tracking. Voici le schéma de notre installation : |
||
|
|
||
Article et publicationSuite à ces travaux de recherche, mon maître de stage a rédigé un article intitulé "Validation de l’aspect et du contenu d’un simulateur immersif pour la formation des opérateurs en anesthésie locorégionale écho guidée". Après soumission puis validation, l'article a été présenté le 8 avril 2022 lors de la 33ᵉ conférence internationale francophone sur l'Interface Humain-Machine à Namur. Lien vers l'article : |
||
Technologies et outils :
Notre équipe :
Temps de développement :3 mois |
||
Sources :Le code source du projet appartient au laboratoire IBISC et ne peut être rendu public. |
||